TB6600 Stepper Motor Controller: Pinout, Arduino interface, at kung paano ito gumagana
Catalog
Pangkalahatang -ideya ng TB6600 Stepper Motor Driver Module
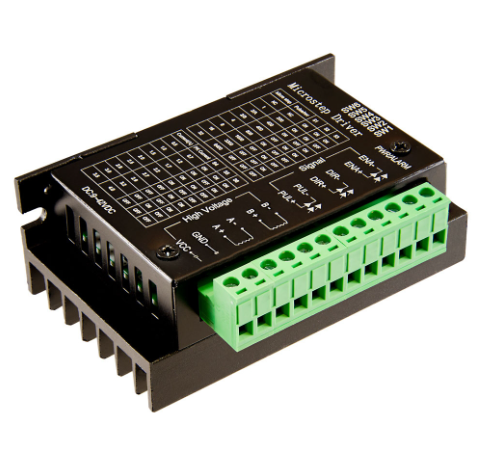
Ang TB6600 Ang module ng driver ng motor ng stepper ay isang aparato na nakikilala sa pamamagitan ng pagiging matatag at kakayahang umangkop para sa pagkontrol ng 2-phase stepper motor.Nag -uugnay ito nang walang putol sa isang malawak na hanay ng mga microcontroller, karamihan sa Arduino, na pinupukaw ang paglikha ng tumpak na 5V digital na mga output ng pulso.Ang mga output na ito ay pabago -bago para sa pagpapanatili ng maselan na balanse ng kontrol sa motor.Ang pagpapatakbo sa loob ng isang saklaw ng boltahe na 9-42V DC at pagsuporta sa isang rurok na kasalukuyang 4 amps, ito ay isang maraming nalalaman na pagpipilian para sa iba't ibang mga proyekto na hinihimok ng motor.Ang kakayahang umangkop na ito ay nagbibigay -daan sa iyo upang mahusay na pamahalaan ang pagpoposisyon at bilis ng motor, na kung saan ay lubos na kapaki -pakinabang sa mga aplikasyon na naglalayong mabawasan ang pagiging kumplikado ng coding.Ang high-frequency na Optocoupler na paghihiwalay ng module ay makabuluhang nagpapabuti sa pagiging maaasahan nito sa pamamagitan ng pagbabawas ng mga panganib sa pagkagambala at pagtiyak ng matatag na operasyon.
Ang pagkakaisa na may maraming mga microcontroller ay gumagawa ng driver ng TB6600 na isang angkop na pagpipilian para sa mga proyekto na nangangailangan ng masalimuot na kontrol sa motor.Isinasama nito nang maayos ang mga platform tulad ng Arduino, na sumasalamin sa kapasidad nito upang matugunan ang magkakaibang mga inaasahan.Halimbawa, ang paggamit ng driver na ito sa CNC machine o 3D printer ay nagbibigay -daan sa tumpak at kinokontrol na paggalaw, na naglalarawan ng utility nito sa iba't ibang larangan.
Ang module na ito ay nakatayo salamat sa suporta nito para sa parehong 2-phase at 4-phase stepper motor pati na rin ang mga hybrid na pagsasaayos.Ang disenyo ng bipolar H-tulay ay integral sa mahusay na pamamahala ng boltahe at kasalukuyang, tinitiyak na ang driver ay naghahatid ng rurok na pagganap sa buong mga aplikasyon nito.Sa mga kapaligiran kung saan ang katumpakan at pagiging maaasahan ay nauna, tulad ng mga awtomatikong linya ng produksyon at robotics, ang mga tampok na ito ay lubos na pinahahalagahan.
Mga tampok
|
Tampok |
Paglalarawan |
|
Uri ng driver |
Bipolar H-Bridge DC Driver |
|
Output kasalukuyang mga pagpipilian |
8 mga uri (0.5a hanggang 3.5a), mapipili hanggang sa 4 amps |
|
Mga mode ng subdibisyon |
Naghahati ng hanggang sa 32, mapipili sa 6 na mga mode |
|
Mga pagpipilian sa hakbang sa micro |
8 Mga Uri (1, 2/A, 2/B, 4, 8, 16, 32) |
|
Paghiwalay ng signal ng input |
High-speed photoelectric paghihiwalay |
|
Interface |
Buong pamantayang solong interface ng pulso |
|
Offline hold function |
Oo |
|
Pagiging angkop sa kapaligiran |
Semi-nakapaloob na katawan para sa malupit na mga kapaligiran |
|
Power lock function |
Semi-awtomatiko, pag-save ng enerhiya |
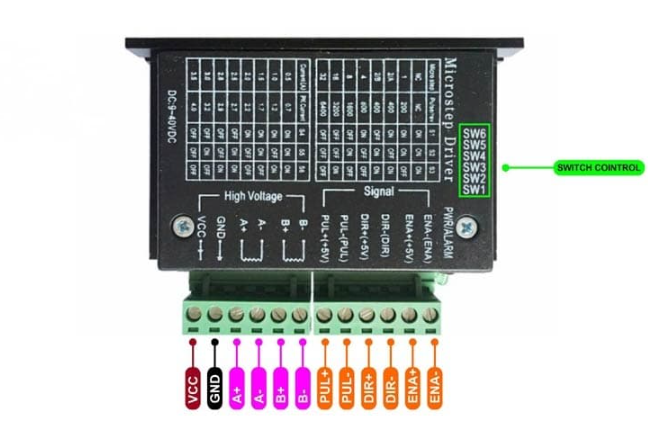
Pag -configure ng PIN
Mga Teknikal na Teknikal
|
Pagtutukoy |
Mga detalye |
|
Operating boltahe |
9-40V DC |
|
Output kasalukuyang |
0.7a-4.0a (mapipili sa 8 mga hakbang sa pamamagitan ng mga switch ng dip) |
|
Pag -input ng dalas ng pulso |
Hanggang sa 20kHz |
|
Mga antas ng signal ng input |
5V antas ng signal |
|
Pulso bawat rebolusyon |
200-6400 |
|
Kasalukuyang logic signal |
8A-15A |
|
Pagiging tugma ng motor |
Angkop para sa 2-phase at 4-phase stepper motor |
|
Mga tampok ng proteksyon |
Overcurrent, overheat protection |
|
Paghiwalay ng input |
Optically nakahiwalay |
|
Paglaban sa pagkakabukod |
500 megohms |
|
Suportadong mode |
PUL/FIR mode |
|
Gastos |
Mababang gastos |
Ang pagsasaayos ng H-Bridge Circuit para sa TB6600
Ang module ng driver ng motor ng TB6600 stepper ay isang malubhang sangkap na idinisenyo upang makontrol ang parehong 2-phase at 4-phase stepper motor, na gumagamit ng isang bi-polar na pagsasaayos ng H-tulay para sa mahusay na operasyon.Ang pagsasaayos na ito ay gumagamit ng MOSFET transistors upang matiyak ang mataas na pagganap sa mga tuntunin ng kasalukuyang paghawak at thermal stabil.Ang module ay nagpapatakbo sa pamamagitan ng pakikipag -ugnay sa dalawang pangunahing control pin: ang hakbang na pin, na nag -uudyok sa motor na humakbang sa bawat pulso, at ang direksyon ng pin, na tumutukoy sa rotational direksyon ng motor batay sa boltahe na inilalapat.Sama -sama, ang mga input na ito ay nagbibigay -daan sa tumpak na kontrol sa pagkakasunud -sunod ng hakbang ng motor at direksyon ng pag -ikot.

Ang circuit diagram ay nagtatampok ng apat na pangunahing transistor, T1, T2, T3, at T4, na nakaayos sa isang istraktura ng H-tulay.Ang mga MOSFET na ito ay ang gulugod ng operasyon ng module, na nagpapahintulot sa bidirectional flow ng kasalukuyang kinakailangan upang himukin ang stepper motor.Bilang karagdagan, ang diagram ay nagsasama ng mga diode ng flyback (D1, D2, D3, at D4), na susi para sa pagprotekta sa circuit mula sa mga spike ng boltahe na sanhi ng induktibong pag -load ng motor.Ang mga diode na ito ay pumipigil sa labis na labis at pinsala sa mga sensitibong sangkap sa panahon ng operasyon.Ang A+, A-, B+, at B-terminals ay ginagamit upang ikonekta ang motor, tinitiyak ang tumpak at kinokontrol na paggalaw ng baras ng motor.
Paano pinapayagan ng H-tulay ang pag-ikot ng motor?
Ang driver ng TB6600 ay nagpapatakbo sa pamamagitan ng coordinated na pagkilos ng MOSFET transistors sa H-tulay.Halimbawa:
• Ang pag-ikot ng orasan ay nangyayari kapag ang mga transistor T1 at T4 ay isinaaktibo, na nagdidirekta ng kasalukuyang daloy mula sa A+ hanggang A-.
• Ang pag-ikot ng counter-clockwise ay nangyayari kapag ang T2 at T3 ay nakikibahagi, na binabaligtad ang kasalukuyang daloy mula A- hanggang A+.
Ang alternating na pag -activate ng mga transistor ay nagsisiguro ng maayos na paggalaw ng bidirectional.Upang makamit ang pinakamainam na metalikang kuwintas at mahusay na operasyon, ang tumpak na tiyempo at regulasyon ng boltahe ay mahalaga.
Mga mode ng operasyon para sa maraming nalalaman kontrol
Sinusuportahan ng TB6600 ang apat na natatanging mga mode ng operating, bawat isa ay idinisenyo upang balansehin ang metalikang kuwintas, katumpakan, at laki ng hakbang, depende sa mga kinakailangan sa aplikasyon:
• Mode ng alon: Sa mode na ito, isang coil lamang ang pinalakas nang paisa -isa.Ang pag -activate ng isang solong coil ay umiikot sa motor sa pamamagitan ng 90 degree sa isang direksyon habang binabaligtad ang kasalukuyang umiikot ito sa kabaligtaran ng direksyon.Sa pamamagitan ng alternating sa pagitan ng mga coils, nakamit ng motor ang patuloy na operasyon.Ang mode na ito ay simple ngunit nagbibigay ng mas kaunting metalikang kuwintas kumpara sa iba pang mga mode.
• Full-step mode: Ang parehong mga coil ay pinalakas nang sabay -sabay sa mode na ito, na bumubuo ng isang mas malakas na magnetic field.Nagreresulta ito sa pagtaas ng metalikang kuwintas, na ginagawang perpekto para sa mga aplikasyon na nangangailangan ng higit na lakas at katatagan.
• Kalahating hakbang na mode: Ang isang kumbinasyon ng mode ng alon at mode na buong hakbang, ang mode na ito ay pumalit sa pagitan ng pagpapagana ng isang solong coil at parehong coils.Ito ay epektibong binabawasan ang laki ng hakbang sa 45 degree, na nagbibigay ng balanse sa pagitan ng katumpakan at metalikang kuwintas.Gayunpaman, maaaring mag -iba ang metalikang kuwintas depende sa kung ang isa o parehong coils ay pinalakas sa isang partikular na hakbang.
• Mode ng microstep : Ang pinaka -tumpak sa lahat ng mga mode, ang mode ng microstep ay binabawasan ang laki ng hakbang kahit na sa pamamagitan ng maingat na pag -modulate ng kasalukuyang sa pamamagitan ng mga phase ng motor.Nakamit ito gamit ang advanced circuitry upang lumikha ng makinis at unti -unting paglilipat sa pagitan ng mga hakbang.Ang mode na ito ay mainam para sa mga application na nangangailangan ng mataas na katumpakan at pare -pareho ang metalikang kuwintas, tulad ng CNC machine o robotics.
Pagsasama ng TB6600 kay Arduino Uno
Ang mahusay na kontrol ng mga stepper motor ay nangangailangan ng isang kumbinasyon ng maaasahang hardware at maingat na na -program na software.Ang driver ng TB6600 stepper motor ay nakatayo bilang isang mahusay na tool para sa pagpapatakbo ng 2-phase stepper motor.Sinusuportahan nito ang maraming mga mode ng pagpapatakbo, tulad ng alon, buong hakbang, kalahating hakbang, at micro-stepping.Ang mga built-in na tampok na proteksyon nito-kasama na ang mga pangangalaga laban sa mababang boltahe, labis na labis, at sobrang pag-init-gawin itong isang matatag na pagpipilian para sa mga proyekto na humihingi ng katumpakan at tibay.
Upang mai -set up ang TB6600 na may isang Arduino uno, tipunin ang mga sumusunod na sangkap:
• Arduino uno R3
• TB6600 Stepper Motor Driver (4A bersyon)
• Stepper Motor (na may inirekumendang rating ng 1.65A)
• maaasahang supply ng kuryente (hal., Isang baterya o regulated na mapagkukunan ng kapangyarihan ng DC)
• Mga Jumper Wires
• Naka -install ang Arduino IDE sa iyong computer
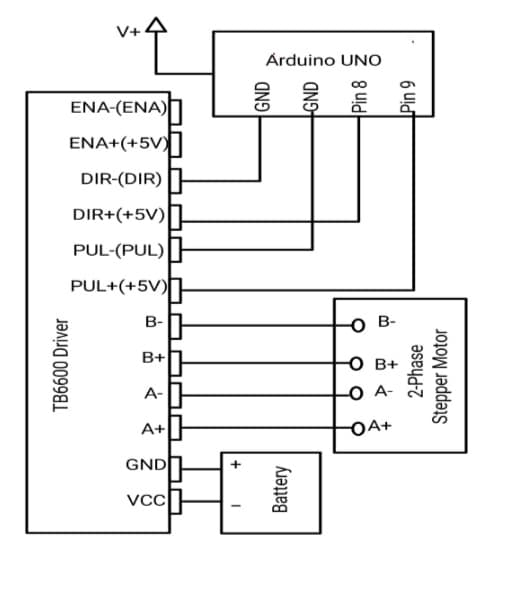
Upang maisama ang TB6600 sa Arduino, sundin ang mga detalyadong tagubiling ito
Ikonekta ang mga signal ng direksyon at pulso
• I -link ang mga terminal ng Dir+ at Pul+ sa TB6600 hanggang Arduino Pins 8 at 9, ayon sa pagkakabanggit.Ang mga pin na ito ay nagpapadala ng mga signal ng direksyon at pulso.
• Ikabit ang mga dir- at pulos sa lupa (gnd) pin ng Arduino.
• Ikonekta ang motor sa TB6600: Ikabit ang mga wire ng motor ng stepper sa mga terminal ng TB6600.
• A+ at A- para sa isang coil ng motor.
• B+ at B- para sa iba pang likid.
• Power ang driver ng TB6600: Ikonekta ang VCC at GND pin sa TB6600 sa iyong suplay ng kuryente.Tiyakin na ang boltahe ay tumutugma sa mga kinakailangan ng motor at driver upang maiwasan ang pinsala.
Pag -aayos ng resolusyon ng microstep
Pinapayagan ka ng TB6600 na mag-ayos ng katumpakan ng paggalaw ng motor ng stepper gamit ang SW1 at SW2 switch.Ayusin ang mga switch na ito tulad ng mga sumusunod:
• ¼ Hakbang Resolusyon: Itakda ang SW1 at SW2 OFF.
• ⅛ Hakbang Resolusyon: Itakda ang SW1 OFF at SW2 ON.
• 1/32 Hakbang Resolusyon: Itakda ang parehong SW1 at SW2.
• Full-Step Mode: Itakda ang parehong SW1 at SW2 ON.
Talahanayan ng katotohanan
|
SW2 |
Resolusyon ng microstep |
|
Off |
1/32 Hakbang |
|
Sa |
1/8 hakbang |
|
Off |
1/4 hakbang |
|
Sa |
Buong hakbang |
Pinapayagan ka ng mga pagsasaayos ng switch na ma -optimize ang balanse sa pagitan ng katumpakan at bilis batay sa mga pangangailangan ng iyong proyekto.
Upang matiyak na ang iyong motor ay nagpapatakbo sa loob ng ligtas na kasalukuyang mga limitasyon, ang TB6600 ay nagtatampok ng mga karagdagang switch (SW4 at SW6) para sa pag -aayos ng kasalukuyang daloy.Ang mga setting na ito ay kapaki -pakinabang para sa:
• Pag -iwas sa labis na pinsala.
• Pagpapanatili ng pare -pareho na pagganap ng motor.
• Laging i -verify na ang kasalukuyang motor ay mananatili sa ilalim ng maximum ng driver ng 4A upang maprotektahan ang parehong mga sangkap.
• Kontrolin ang direksyon ng motor: Kung nais mong paikutin ng motor ang anticlockwise, baguhin ang estado ng dir+ pin sa iyong Arduino code.
• Pagsubok at Pag -aayos: Matapos makumpleto ang pag -setup, mag -upload ng isang pangunahing sketch ng control ng motor ng stepper upang mapatunayan ang pag -andar ng mga kable at driver.
• Iwasan ang sobrang pag-init: Tiyakin ang wastong bentilasyon para sa driver ng TB6600, lalo na sa mga application na may mataas na kasalukuyang.
Mga Aplikasyon
Ang module ng TB6600 ay gumaganap ng isang aktibong papel sa kabuuan ng maraming mga sektor kung saan ginagamit ang masusing kontrol ng motor.Ang kakayahang umangkop nito ay kumikinang sa iba't ibang mga pagpapatupad na nagtatampok ng mga natatanging kakayahan:
Posisyon ng Antenna
Sa larangan ng telecommunication, ang pagkamit ng pinakamainam na pagkakahanay ng antena ay sapilitan para sa kalidad ng pagtanggap ng signal at paghahatid.Ang TB6600 ay nagpapadali sa paggalaw ng katumpakan, sa gayon pinapahusay ang pagiging epektibo ng mga sistema ng komunikasyon.
Pamamahala ng Motor Motor
Sa loob ng automation at robotics, ang tumpak na paghawak ng motor ng stepper ay nakamit sa pamamagitan ng TB6600, na nagpapahintulot sa iyo na pinuhin ang katumpakan ng paggalaw at pagiging maaasahan ng sistema ng bolster.
Operasyon ng CNC
Para sa mga machine ng Computer Numerical Control (CNC), ang TB6600 ay nagpapabuti sa masalimuot na mga proseso ng paggupit at paggiling, na nagbibigay -daan sa iyo upang mapanatili ang mataas na antas ng kawastuhan at paulit -ulit na katumpakan sa kanilang trabaho.
3D Pag -print ng katumpakan
Sa additive manufacturing, lalo na ang pag -print ng 3D, ang TB6600 ay nag -aalok ng detalyadong kontrol sa motor, na sumusuporta sa tumpak na pagpoposisyon ng mga ulo ng pag -print na kinakailangan para sa paggawa ng mga kumplikadong hugis at form.
Kumplikadong kontrol sa motor
Mahalaga ang module para sa masalimuot na mga gawain sa kontrol ng motor sa loob ng mga kumplikadong sistema ng automation, pagpapahusay ng kahusayan at pagpapagana ng pino na pamamahala.
Kontrol ng bilis, posisyon, at pag -ikot
Ang TB6600 ay nangunguna sa mga senaryo na nangangailangan ng eksaktong bilis at kontrol ng pag -ikot, na kadalasang ginagamit para sa pag -optimize ng pagganap sa patuloy na pagbabago ng mga kapaligiran.
Mga aparato sa imaging at mga sistema ng pagbabangko
Sinusuportahan ng module ang maaasahang operasyon ng mga camera at ATM sa pamamagitan ng pagtiyak ng makinis, eksaktong paggalaw ng motor, na nagpapalawak ng buhay na pagpapatakbo ng mga aparato.
Katumpakan sa pag -ukit ng mga aparato
Para sa pag -ukit ng mga tool at makinarya, ang TB6600 ay nagbibigay ng tumpak na kontrol na kinakailangan para sa pagpapatupad ng makinis na detalyadong disenyo, isang mapanganib na kadahilanan sa mga industriya kung saan nangingibabaw ang katumpakan at detalye.
Tungkol sa atin
ALLELCO LIMITED
Magbasa nang higit pa
Mabilis na pagtatanong
Mangyaring magpadala ng isang pagtatanong, tutugon kami kaagad.
Madalas na nagtanong [FAQ]
1. Anong power supply ang dapat kong gamitin para sa driver ng TB6600?
Ang TB6600 Stepper Driver ay gumagana sa isang boltahe ng supply ng kuryente sa pagitan ng 8V at 45V.
2. Paano ko makokontrol ang bilis ng motor ng stepper na may TB6600?
Ang TB6600 ay gumagamit ng Pulse-Width Modulation (PWM) upang ayusin ang bilis ng motor.Maaari mong baguhin ang bilis sa pamamagitan ng pagbabago ng dalas ng PWM.
3. Maaari bang suportahan ng TB6600 ang mga high-current stepper motor?
Oo, ang TB6600 ay maaaring hawakan hanggang sa 4.5A, na ginagawa itong katugma sa mga motor na stepper na na -rate hanggang sa kasalukuyang ito.
4. Paano ko baligtarin ang direksyon ng motor gamit ang TB6600?
Upang baligtarin ang direksyon ng motor, ilipat ang pagkakasunud-sunod ng signal ng input sa control pin (hal., IN1-in2-in3-in4 para sa pasulong, in4-in3-in2-in1 para baligtad).
5. Maaari ba akong kumonekta sa isang stepper motor na may higit sa 4 na mga wire sa TB6600?
Ang TB6600 ay ginawa para sa 4-wire stepper motor.Kung ang iyong motor ay may higit sa 4 na mga wire, kakailanganin mo ng ibang driver.
6. Ang TB6600 ay katugma ba sa isang motor na NEMA23 stepper?
Ang TB6600 ay gumagana nang maayos sa NEMA17 motor ngunit sa pangkalahatan ay hindi angkop para sa NEMA23 motor dahil sa kanilang mas mataas na kasalukuyang mga kinakailangan.

Isang kumpletong gabay sa E18-D80NK adjustable IR sensor
sa 2024/12/12
Ipinaliwanag ng DS3231 RTC Module: PIN Diagram, Specs, at Microcontroller Interfacing
sa 2024/12/12
Mga sikat na post
-

Complex Instruction Set Computers: Paano nila binago ang computing?
sa 8000/04/18 147757
-

USB-C pinout at mga tampok
sa 2000/04/18 111935
-

Gamit ang Xilinx Unified Simulation Primitives: Isang komprehensibong gabay sa disenyo ng FPGA at kunwa
sa 1600/04/18 111349
-

Mga Voltahe ng Power Supply sa Electronics: Kahulugan ng VCC, VDD, VEE, VSS, at GND
sa 0400/04/18 83720
-

RJ45 Gabay sa Konektor: Pinout, mga kable, mga uri ng cable, at paggamit
sa 1970/01/1 79508
-

Ang panghuli gabay sa mga code ng kulay ng kawad sa mga modernong sistema ng elektrikal
Ang paraan ng paggamit ng aming mga de -koryenteng sistema ay hindi lamang para sa mga hitsura.Ang bawat kulay ng kawad ngayon ay nagpapahiwatig ng isang tiyak na pag -andar, na ginagawang mas mada...sa 1970/01/1 66904
-

Purge Valve Guide: Function, sintomas, pagsubok, at kapalit para sa pinakamainam na pagganap ng engine
Ang balbula ng purge ay isang pangunahing bahagi ng sistema ng kotse na tumutulong na mapanatiling malinis ang hangin sa pamamagitan ng pamamahala ng mga singaw ng gasolina bago sila makatakas sa k...sa 1970/01/1 63028
-

Kalidad (Q) Factor: Mga Equation at Application
Ang kalidad na kadahilanan, o 'Q', ay mahalaga kapag sinusuri kung gaano kahusay ang mga inductors at resonator sa mga elektronikong sistema na gumagamit ng mga frequency ng radyo (RF).Sinusukat ng...sa 1970/01/1 63012
-

Pagkamit ng pagganap ng rurok na may maximum na teorema ng paglipat ng kuryente
Ang maximum na teorema ng paglipat ng kuryente ay nagpapaliwanag kung paano ang enerhiya mula sa isang mapagkukunan, tulad ng isang baterya o generator, ay dumadaloy sa isang konektadong pagkarga.I...sa 1970/01/1 54081
-

A23 Mga pagtutukoy ng baterya at pagiging tugma
Ang baterya ng A23 ay isang maliit, hugis-silindro na baterya na may mataas na boltahe.Tinatawag din ang 23A, 23AE, o MN21, tumatakbo ito sa 12 volts at mas mataas kaysa sa mga baterya ng ...sa 1970/01/1 52123
Mainit na bahagi ng numero
-

LM4040CIM3-2.5
Texas Instruments
IC VREF SHUNT 0.5% SOT23-3
CAY16-220J4LF
Bourns Inc.
RES ARRAY 4 RES 22 OHM 1206
CSD25485F5T
Texas Instruments
MOSFET P-CH 20V 5.3A 3PICOSTAR
GX-H8A
Panasonic Industrial Automation Sales
SENSOR PROX INDUCTIVE 2.1MM MOD
TYN612MFP
STMicroelectronics
SCR 600V 12A TO220FPAB
2SB507E
onsemi
TRANSISTOR
PIC24FJ128GA308-I/PT
Microchip Technology
IC MCU 16BIT 128KB FLASH 80TQFP
ADS1242IPWT
Texas Instruments
IC ADC 24BIT SIGMA-DELTA 16TSSOP
RC0402FR-071RL
YAGEO
RES 1 OHM 1% 1/16W 0402
SI1153-AA00-GMR
Silicon Labs
SENSOR OPT 525NM AMBIENT 10DFN
MSP430F122IPWR
Texas Instruments
IC MCU 16BIT 4KB FLASH 28TSSOP
APXA100ARA151MH70G
United Chemi-Con
CAP ALUM POLY 150UF 20% 10V SMD
S-5716ACDH1-M3T1U
ABLIC Inc.
MAGNETIC SWITCH OMNIPOL SOT23-3
MRFE6VP100HR5
NXP USA Inc.
RF MOSFET LDMOS 50V NI780-4
MAX828EUK-T
Analog Devices Inc./Maxim Integrated
IC REG CHARG PUMP INV 25MA SOT23
IR21834SPBF
Infineon Technologies
IC GATE DRVR HALF-BRIDGE 14SOIC
BCW65CLT1
onsemi
TRANS NPN 32V 0.8A SOT23-3
MDKK1616T1R5MM
Taiyo Yuden
FIXED IND 1.5UH 1.33A 185MOHM SM -

MK1491-06SLFTR
Renesas Electronics America Inc
IC CLK SOURCE AMD GEODE 28-SOIC
PCA9535AHF,128
NXP USA Inc.
IC XPND 400KHZ I2C SMBUS 24HWQFN
IRU1206-25CD
Infineon Technologies
IC REG LINEAR 2.5V 1A DPAK
AT29C256-15JC
Microchip Technology
IC FLASH 256KBIT PARALLEL 32PLCC
MX25L1673EM2I-10G
Macronix
IC FLASH 16MBIT SPI 104MHZ 8SOP
SM5S33A-E3/2D
Vishay General Semiconductor - Diodes Division
TVS DIODE 33VWM 53.3VC DO218AB
GRM1885C1H102GA01D
Murata Electronics
CAP CER 1000PF 50V C0G/NP0 0603
08052A2R2CAT2A
KYOCERA AVX
CAP CER 2.2PF 200V NP0 0805
DG333ADW-T1-E3
Vishay Siliconix
IC SWITCH SPDT X 4 45OHM 20SOIC
T6801-TAQY
Microchip Technology
IC GATE DRVR LOW-SIDE 8SOIC
IXGP12N60CD1
IXYS
IGBT 600V 24A 100W TO220
06031A3R6CAT4A
KYOCERA AVX
CAP CER 3.6PF 100V C0G/NP0 0603
10CL040ZF484I8G
Intel
IC FPGA 325 I/O 484FBGA
2N5320
Microchip Technology
CUSTOM
ADSP-21060LKSZ-160
Analog Devices Inc.
IC DSP CONTROLLER 32BIT 240MQFP
VI-234-EU
Vicor Corporation
DC DC CONVERTER 48V 200W
OPA2348AIDR
Texas Instruments
IC CMOS 2 CIRCUIT 8SOIC
IS42S16400F-7TLI-TR
ISSI, Integrated Silicon Solution Inc
IC DRAM 64MBIT PAR 54TSOP II -

MPC8248CZQMIBA
Freescale Semiconductor
POWERQUICC 32 BIT POWER ARCHITEC
MC33793DR2
NXP USA Inc.
IC DSI SLAVE FOR R-SENSE 16-SOIC
AD8072JN
Analog Devices Inc.
IC VIDEO AMP DUAL 8-DIP
PIC24EP256GP204-I/PT
Microchip Technology
IC MCU 16BIT 256KB FLASH 44TQFP
SIT5156AI-FK-33N0-10.000000
SiTime
MEMS OSC TCXO 10.0000MHZ LVCMOS
DAC8830MCDEP
Texas Instruments
IC DAC 16BIT V-OUT 8SOIC
VE-JWF-EZ
Vicor Corporation
DC DC CONVERTER 72V 25W
IRF7402PBF
Infineon Technologies
MOSFET N-CH 20V 6.8A 8SO
TIP29C
onsemi
TRANS NPN 100V 1A TO220
CYD18S36V18-167BBAI
Infineon Technologies
IC SRAM 18MBIT PAR 256FBGA
BSZ0911LSATMA1
Infineon Technologies
MOSFET N-CH 30V 12A/40A TSDSON
ISL8485ECB-T
Renesas Electronics America Inc
IC TRANSCEIVER HALF 1/1 8SOIC
LT3598EFE#PBF
Linear Technology
LT3598 - 6-String 30mA LED Drive
046703.5NR
Littelfuse Inc.
FUSE BRD MNT 3.5A 32VAC/VDC 0603
V24C24E100BG
Vicor Corporation
DC DC CONVERTER 24V 100W
1N4935
Diotec Semiconductor
DIODE FR DO-41 200V 1A
GRM3166S1H470JZ01D
Murata Electronics
CAP CER 47PF 50V S2H 1206
MC9S08QA2CFQE
NXP USA Inc.
IC MCU 8BIT 2KB FLASH 8DFN