Panimula sa Control System: Paggawa, Mga Uri at Aplikasyon
Gumagamit ka ng mga control system sa tuwing pinapanatili ng isang makina ang isang halaga nang awtomatiko, tulad ng temperatura, bilis, o antas.Ipinapaliwanag ng artikulong ito kung ano ang isang control system, kung paano gumagana ang mga bahagi nito nang magkasama, at kung paano pinapanatili ng feedback na tama ang output.Makikita mo rin ang mga pangunahing uri ng mga system at kung paano kumikilos ang mga ito sa pagpapatakbo.Kasama ang mga karaniwang gamit, benepisyo, at limitasyon.Catalog
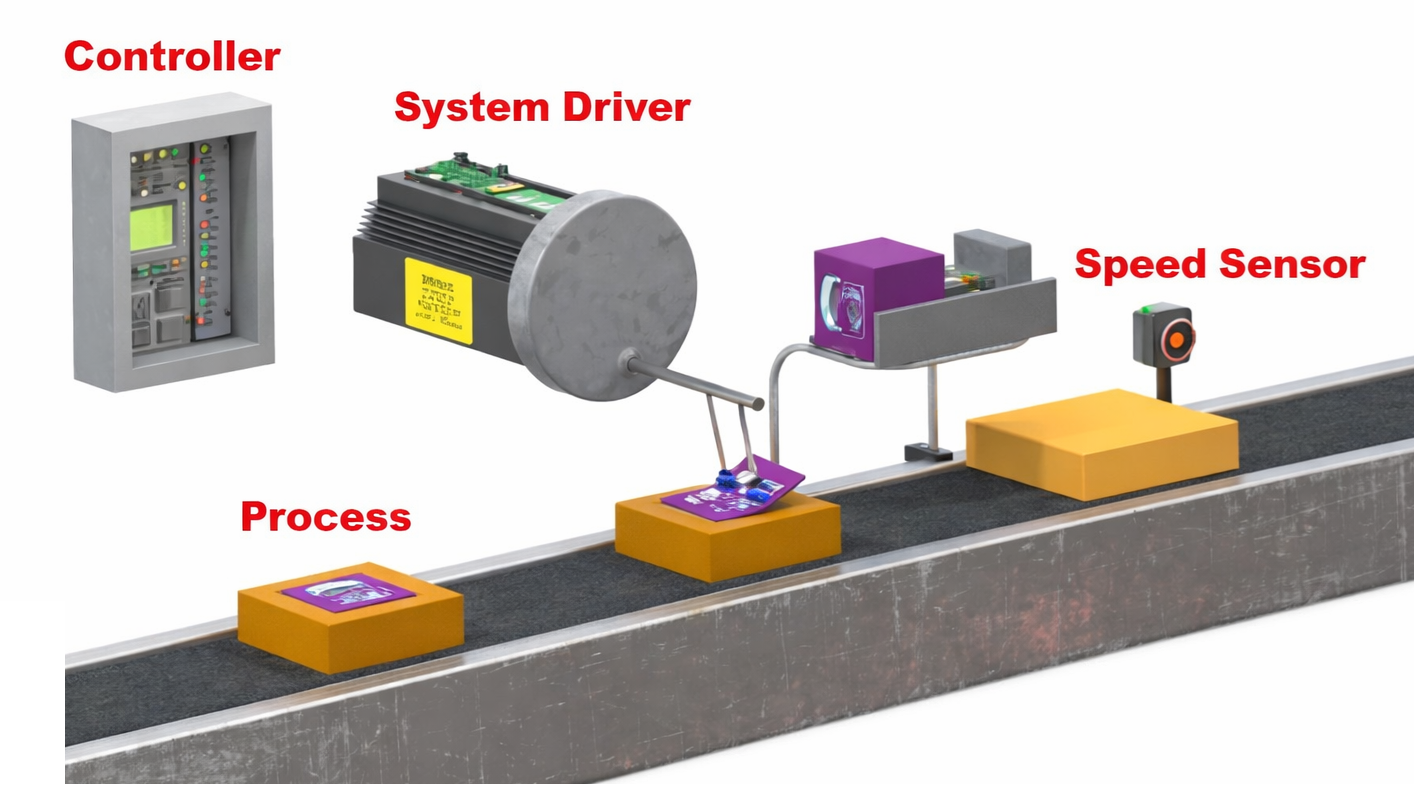
Larawan 1. Halimbawa ng Control System
Ano ang isang Control System?
Ang isang control system ay isang sistema na nagpapanatili ng isang nasusukat na halaga na malapit sa isang nais na target na halaga.Ang layunin nito ay awtomatikong ayusin ang isang proseso upang manatiling tama ang output kahit na nagbabago ang mga kondisyon.Halimbawa, pinapanatili ng thermostat ng kwarto ang temperatura malapit sa itinakdang antas, at pinapanatili ng cruise control ng sasakyan ang sasakyan sa napiling bilis.Ang isang water tank level controller ay nagpapanatili din ng taas ng tubig sa isang napiling marka.Sa madaling salita, patuloy na sinusuri at itinatama ng isang control system ang isang variable upang tumugma sa kinakailangang halaga.
Mga Pangunahing Elemento ng isang Control System
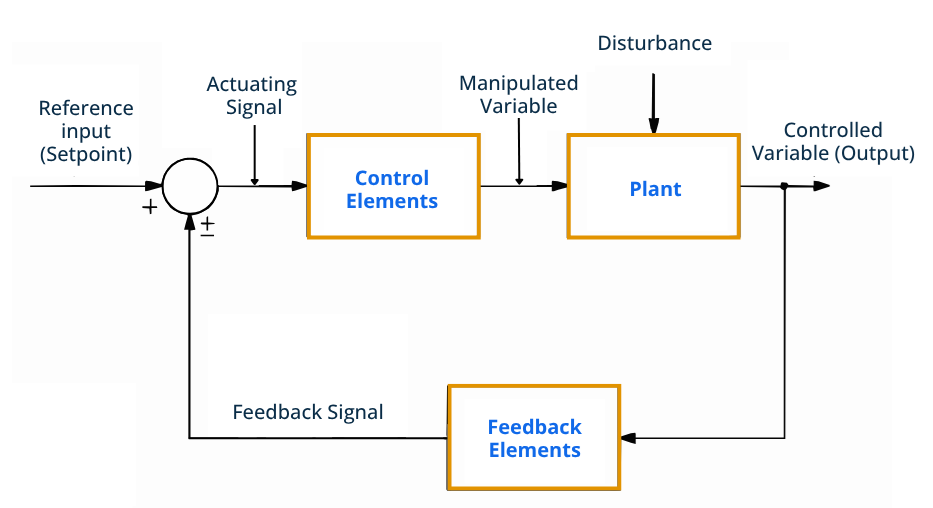
Figure 2. Control System Block Diagram
Ang isang control system ay binubuo ng ilang karaniwang bahagi, bawat isa ay gumaganap ng isang partikular na gawain.
• Reference Input (Setpoint)
Ito ang nais na halaga na sinusubukang panatilihin ng system.Kinakatawan nito ang napiling kundisyon ng target.Palaging inihahambing ng system ang aktwal na halaga sa reference na ito.
• Pag-andar ng Signal
Ito ang signal na ginawa pagkatapos ihambing ang nais at aktwal na mga halaga.Kinakatawan nito kung gaano karaming pagsasaayos ang kailangan.Inihahanda ng signal ang system para sa pagwawasto.
• Mga Elemento ng Kontrol
Ang mga bahaging ito ay humahawak sa proseso ng paggawa ng desisyon.Tinutukoy nila ang corrective action batay sa signal na natanggap.Inihahanda ng output mula sa yugtong ito ang proseso para sa pagsasaayos.
• Manipulated Variable
Ito ang adjustable na dami na ipinadala patungo sa proseso.Ang pagbabago sa halagang ito ay nakakaimpluwensya sa panghuling output.Ito ang variable na maaaring direktang mag-iba ng system.
• Halaman
Ang halaman ay ang prosesong kinokontrol.Gumagawa ito ng panghuling halaga ng output.Nilalayon ng system na panatilihin ang output na ito sa nais na antas.
• Pagkagambala
Ito ay isang hindi gustong pagbabago na nakakaapekto sa proseso.Maaari nitong itulak ang output palayo sa nais na halaga.Ang sistema ay dapat magbayad para dito.
• Kinokontrol na Variable (Output)
Ito ang aktwal na sinusukat na resulta ng proseso.Ipinapakita nito ang kasalukuyang kalagayan ng sistema.Ang layunin ay panatilihin itong katumbas ng reference input.
• Mga Elemento ng Feedback
Sinusukat ng mga ito ang output at nagpapadala ng impormasyon pabalik para sa pagsusuri.Binibigyan nila ang sistema ng kasalukuyang kondisyon.Ito ay nagpapahintulot sa pagwawasto na matukoy.
• Signal ng Feedback
Ito ang ibinalik na impormasyon tungkol sa halaga ng output.Kinakatawan nito ang kondisyon ng proseso.Ginagamit ito ng system para sa paghahambing.
Prinsipyo ng Paggawa ng Control System
Figure 3. Working Principle ng Control System
Ang prinsipyo ng pagtatrabaho ng isang control system ay nagsisimula sa isang nais na halaga ng input na ibinibigay sa system.Pagkatapos, ikinukumpara ng system ang halagang ito sa aktwal na halaga ng output.Ang pagkakaiba sa pagitan nila ay tinatawag na error signal.Kung umiiral ang error, bubuo ang system ng signal ng pagwawasto.Inaayos ng pagwawasto na ito ang proseso upang mabawasan ang error.Nagbabago ang output at patuloy na sinusuri muli.Ang cycle ay umuulit hanggang ang output ay malapit na tumugma sa nais na halaga.
Mga Katangian ng Control System
Ang mga control system ay sinusuri batay sa kung gaano kahusay ang pagganap ng mga ito sa panahon ng operasyon.Inilalarawan ng mga katangiang ito ang kalidad at pagiging maaasahan ng tugon ng system.
|
Mga katangian |
Paglalarawan |
|
Katatagan |
Ginagawa ang output
hindi magkakaiba;babalik sa steady value pagkatapos ng kaguluhan |
|
Katumpakan |
Panghuling error ≤
±2–5% ng itinakdang halaga |
|
Katumpakan |
Output
variation ≤ ±1% sa ilalim ng parehong input |
|
Oras ng Pagtugon
|
Inisyal
nangyayari ang reaksyon sa loob ng sinusukat na oras ng pagkaantala (td) |
|
Rise Time |
Oras mula 10%
hanggang 90% ng huling halaga |
|
Oras ng Pag-aayos |
Pumasok at
nananatili sa loob ng ±2% na banda |
|
Overshoot |
Lumampas ang peak
panghuling halaga ng % na halaga |
|
Steady-State
Error |
pare-pareho
offset na natitira pagkatapos ng stabilization |
|
pagiging sensitibo |
ΔOutput /
ΔAng ratio ng pagbabago ng parameter |
|
Katatagan |
Pinapanatili
operasyon sa kabila ng pagbabago ng kaguluhan |
|
Bandwidth |
Nagpapatakbo
epektibong hanggang −3 dB cutoff frequency |
|
Pag-uulit |
Parehong input
gumagawa ng parehong output sa loob ng tolerance |
|
pagiging maaasahan |
Nagpapatakbo
nang walang pagkabigo para sa rated operating time (MTBF) |
|
Pamamasa |
Oscillation
ang pagkabulok ay tinutukoy ng damping ratio ζ |
|
Bilis ng
Tugon |
Kabuuang oras sa
maabot ang matatag na kondisyon |
Mga Uri ng Control System
Inuri ang mga control system batay sa kung paano nila pinangangasiwaan ang impormasyon, signal, at gawi sa pagtugon.Nakapangkat ang mga ito ayon sa paggamit ng feedback, form ng signal, at pag-uugali sa matematika.
Open-Loop Control System
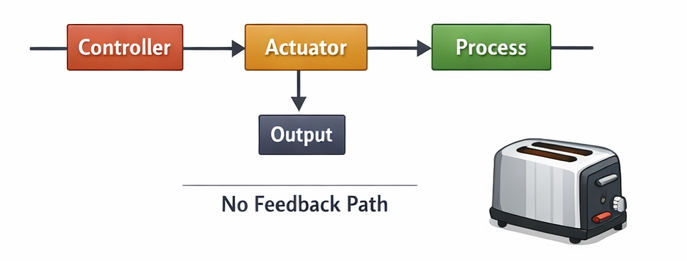
Figure 4. Open-Loop Control System Diagram
Ang isang open-loop control system ay isang sistema kung saan ang output ay hindi nakakaimpluwensya sa control action.Nagpapadala ang system ng isang command at ipinapalagay na tama ang resulta nang hindi ito sinusuri.Dahil walang landas ng feedback, hindi nito awtomatikong itatama ang mga error o abala.Ang pagganap ay pangunahing nakasalalay sa wastong pagkakalibrate at mga kondisyon ng pagpapatakbo.Ang mga system na ito ay simple, mura, at madaling idisenyo.Gayunpaman, ang mga pagbabago sa pagkarga o kapaligiran ay maaaring makaapekto sa huling resulta.Kasama sa mga karaniwang halimbawa ang electric toaster timer, washing machine timer control, at fixed irrigation timer.
Closed-Loop Control System
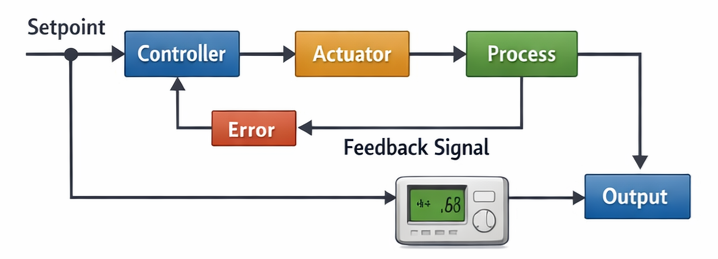
Figure 5. Closed-Loop Control System Diagram
Ang closed-loop control system ay isang system na gumagamit ng feedback upang awtomatikong ayusin ang output nito.Sinusukat ng system ang resulta at inihahambing ito sa nais na halaga.Kung lumilitaw ang isang pagkakaiba, inilalapat ang isang pagwawasto upang mabawasan ang error.Ang tuluy-tuloy na pagsasaayos na ito ay nagbibigay-daan sa tumpak at matatag na operasyon kahit na iba-iba ang mga kondisyon.Ang mga closed-loop system ay nagbibigay ng mas mahusay na katumpakan at pagiging maaasahan kaysa sa mga open-loop system.Malawakang ginagamit ang mga ito sa mga modernong awtomatikong aplikasyon ng kontrol.Kasama sa mga karaniwang halimbawa ang pagkontrol sa temperatura ng air conditioner, cruise control ng sasakyan, at mga awtomatikong regulator ng boltahe.
Continuous-Time Control System
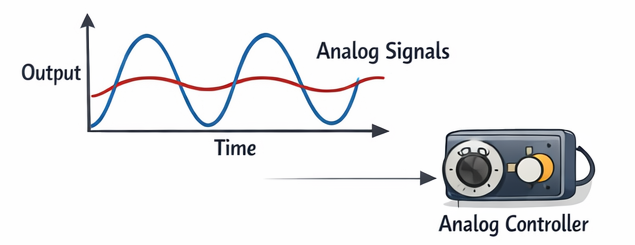
Figure 6. Continuous-Time (Analog) Control Signal
Ang isang tuluy-tuloy na oras na control system ay nagpoproseso ng mga signal na nagbabago nang maayos sa paglipas ng panahon.Ang input at output ay umiiral sa bawat sandali nang walang pagkaantala.Ang mga sistemang ito ay karaniwang gumagana sa mga analog na elektrikal o mekanikal na signal.Dahil tuloy-tuloy ang signal, swabe at natural din ang response.Ang mga continuous-time system ay karaniwang matatagpuan sa mga tradisyunal na analog controllers.Ang mga ito ay angkop para sa mga pisikal na proseso na nangangailangan ng agarang reaksyon.Kasama sa mga halimbawa ang mga analog speed regulator, kontrol sa volume ng audio amplifier, at kontrol sa posisyon ng hydraulic valve.
Discrete-Time Control System
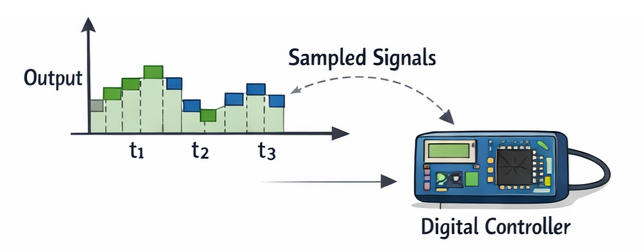
Figure 7. Discrete-Time (Digital) Control Signal
Gumagana ang isang discrete-time control system gamit ang mga sample na signal ng data.Sinusuri at ina-update ng system ang mga halaga lamang sa mga partikular na agwat ng oras.Ang mga signal na ito ay karaniwang pinoproseso ng mga digital controller o microprocessors.Ang output ay nagbabago nang hakbang-hakbang sa halip na patuloy.Ang ganitong mga sistema ay nagpapahintulot sa programmable na operasyon at flexible na pagsasaayos.Malawakang ginagamit ang mga ito sa modernong electronic at computer-based na kontrol.Kasama sa mga halimbawa ang kontrol sa temperatura na nakabatay sa microcontroller, digital na kontrol sa bilis ng motor, at mga smart home thermostat.
Linear Control System
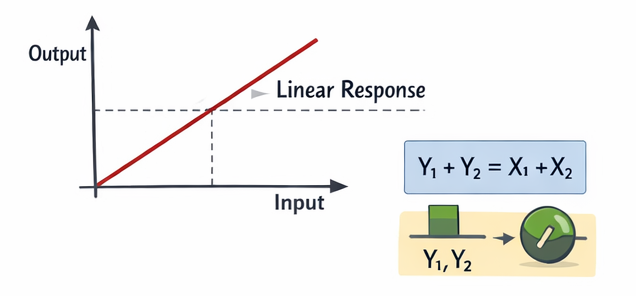
Figure 8. Linear System Input-Output Relationship
Ang isang linear na sistema ng kontrol ay sumusunod sa isang proporsyonal na relasyon sa pagitan ng input at output.Kung doble ang input, doble din ang output sa ilalim ng parehong mga kundisyon.Ang mga sistemang ito ay nakakatugon sa prinsipyo ng superposisyon kung saan ang pinagsamang mga input ay gumagawa ng pinagsamang mga output.Ang linear na pag-uugali ay nagbibigay-daan sa predictable at madaling mathematical analysis.Karamihan sa mga teoretikal na disenyo ng kontrol ay nagpapalagay ng linear na operasyon para sa pagiging simple.Nakakatulong ang mga linear na modelo sa pagdidisenyo ng matatag at tumpak na mga sistema.Kasama sa mga halimbawa ang mga small-signal electronic amplifier at low-load na motor control region.
Nonlinear Control System
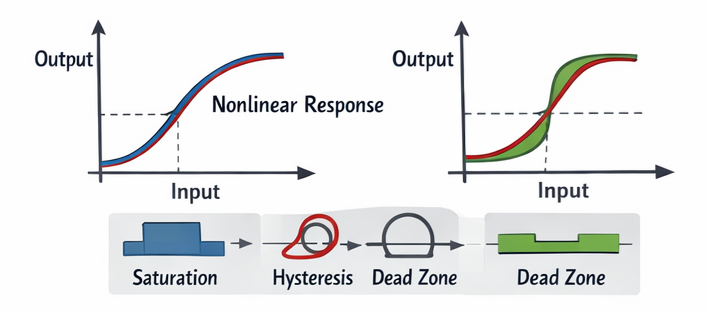
Figure 9. Mga Katangian ng Tugon sa Nonlinear System
Ang isang nonlinear control system ay may output na hindi proporsyonal sa input.Ang tugon ay nagbabago depende sa operating range o kundisyon.Ang maliliit na pagbabago sa input ay maaaring magdulot ng malalaking pagkakaiba-iba ng output o walang pagbabago.Kadalasang lumalabas ang mga epekto gaya ng saturation, hysteresis, at dead zone.Ang mga system na ito ay mas mahirap suriin ngunit kumakatawan sa mga pisikal na proseso nang mas tumpak.Maraming mga sistema ang natural na kumikilos sa isang hindi linear na paraan.Kasama sa mga halimbawa ang mga limitasyon sa paggalaw ng braso ng robot, pag-uugali ng magnetic actuator, at kontrol sa daloy ng balbula sa matinding posisyon.
Mga Kalamangan at Kahinaan ng Mga Control System
Ang mga control system ay nagpapabuti sa pagkakapare-pareho at binabawasan ang manu-manong pagsisikap ngunit nagpapakilala rin ng pagiging kumplikado at gastos.
Mga Bentahe ng Control System
• Pinapanatili ng system ang output na malapit sa kinakailangang halaga sa panahon ng operasyon.
• Ang mga operator ay hindi kailangang patuloy na ayusin ang kagamitan sa pamamagitan ng kamay.
• Ang mga makina ay maaaring tumakbo nang mahabang oras nang hindi madalas na humihinto.
• Awtomatikong itinatama ng system ang mga pagbabago sa mga kundisyon.
• Maaaring suriin ang katayuan ng pagpapatakbo mula sa isang panel o remote na display.
Mga Disadvantages ng Control System
• Mas mataas ang gastos sa pag-setup kaysa sa mga simpleng manual system.
• Ang mga bihasang manggagawa ay kailangan para sa pag-setup at serbisyo.
• Maaaring mabigo ang mga sensor at electronic parts sa paglipas ng panahon.
• Ang paghahanap ng sanhi ng mga problema ay maaaring magtagal.
• Ang sistema ay nakasalalay sa matatag na kuryente.
Mga Application ng Control System
Ginagamit ang mga control system sa parehong pang-industriyang automation at pang-araw-araw na kagamitan upang awtomatikong mapanatili ang wastong operasyon.
1. Industrial Manufacturing
Ang mga makina ng produksyon ay nagpapanatili ng pare-parehong sukat at kalidad ng produkto.Gumagamit ng regulasyon ang mga awtomatikong linya ng pagpupulong upang matiyak ang pag-uulit.Binabawasan nito ang basura at nagpapabuti ng kahusayan.
2. Regulasyon sa Temperatura
Ang mga kagamitan sa pag-init at pagpapalamig ay nagpapanatili ng komportableng kondisyon sa kapaligiran.Ang mga gusali ay umaasa sa awtomatikong pagsasaayos upang patatagin ang panloob na klima.Pinapabuti nito ang kahusayan at ginhawa ng enerhiya.
3. Sistema ng Transportasyon
Gumagamit ang mga sasakyan ng kontrol sa bilis at katatagan para sa mas maayos na operasyon.Kasama sa mga modernong kotse ang cruise control at traction system.Pinapabuti nito ang kaligtasan at pagganap sa pagmamaneho.
4. Power Systems
Kinokontrol ng mga de-koryenteng network ang mga antas ng boltahe at dalas.Inaayos ng mga generator ang output upang tumugma sa demand ng load.Tinitiyak nito ang matatag na suplay ng kuryente.
5. Robotics at Automation
Gumaganap ang mga robot ng tumpak na pagpoposisyon at mga gawain sa paggalaw.Ang mga awtomatikong makina ay patuloy na gumagana nang may mataas na katumpakan.Nagbibigay-daan ito sa advanced na pagmamanupaktura.
6. Kagamitang Medikal
Ang mga device ay nagpapanatili ng mga kontroladong kondisyon sa pagpapatakbo sa panahon ng paggamot.Ang mga kagamitan sa pagsubaybay ay nagpapanatili ng mga halaga sa loob ng mga ligtas na limitasyon.Pinapabuti nito ang kaligtasan at pagiging maaasahan ng pasyente.
7. Mga Kagamitan sa Bahay
Ang mga pang-araw-araw na device ay awtomatikong namamahala sa mga setting ng pagpapatakbo.Ang mga washing machine at refrigerator ay nagpapanatili ng tamang mga kondisyon ng operasyon.Pinapasimple nito ang mga pang-araw-araw na gawain.
8. Aerospace Systems
Ang mga sasakyang panghimpapawid at drone ay nagpapanatili ng matatag na kondisyon ng paglipad.Ang awtomatikong paggabay ay nagpapanatili ng tamang oryentasyon at altitude.Sinusuportahan nito ang maaasahang nabigasyon.
Control System vs Automation vs Embedded System
Ang mga teknolohiyang ito ay malapit na nauugnay ngunit nagsisilbi sa iba't ibang layunin ng inhinyero sa loob ng modernong mga produktong elektroniko at pang-industriya.
|
Tampok |
Kontrolin
Sistema |
Automation |
Naka-embed
Sistema |
|
Pangunahing Pokus |
Regulasyon ng
mga variable |
Proseso
pagbitay |
Device
operasyon |
|
Layunin |
Panatilihin
nais na halaga |
Magsagawa ng mga gawain
awtomatiko |
Tumakbo na nakatuon
mga function |
|
Saklaw |
Tukoy
pag-uugali ng proseso |
Buo
daloy ng trabaho
|
Walang asawa
aparato ng produkto |
|
Desisyon
Kakayahan |
Batay sa
sinusukat na halaga |
Batay sa
naka-program na lohika |
Batay sa
firmware |
|
Paggamit ng Feedback |
Madalas
kinakailangan |
Opsyonal |
Opsyonal |
|
Uri ng Hardware |
Mga sensor at
mga actuator |
Mga makina at
mga controllers |
Microcontroller
board |
|
Tungkulin ng Software |
Pagkalkula
at pagwawasto |
Pagsusunod-sunod
at koordinasyon |
Device
kontrolin ang lohika |
|
Uri ng Tugon |
tuloy-tuloy
pagsasaayos |
Gawain
pagbitay |
Functional na operasyon |
|
Laki ng System |
Maliit sa
daluyan |
Katamtaman hanggang
malaki |
Napakaliit |
|
Kakayahang umangkop |
Katamtaman |
Mataas |
Limitado |
|
Oras
Kinakailangan |
Mataas |
Katamtaman |
Mataas |
|
Aplikasyon
Antas |
Antas ng proseso |
Antas ng halaman |
Antas ng produkto |
|
Halimbawa |
Temperatura
kontrol |
Pabrika
linya ng produksyon |
Smart watch |
|
Pagsasama |
Bahagi ng
automation |
Naglalaman
mga sistema ng kontrol |
Sinusuportahan ang pareho |
Konklusyon
Ang mga control system ay nagpapanatili ng katatagan sa pamamagitan ng patuloy na paghahambing ng aktwal na output sa isang target na halaga at pagwawasto ng anumang error.Ang kanilang pagganap ay nakasalalay sa mga pangunahing elemento tulad ng feedback, pagkilos ng controller, at ang kinokontrol na proseso.Tinutukoy ng iba't ibang klasipikasyon kung paano pinangangasiwaan ang mga signal at kung gaano katumpak ang pagtugon ng isang system sa mga kaguluhan.Dahil sa mga kakayahang ito, malawakang ginagamit ang mga control system sa industriya, transportasyon, enerhiya, mga medikal na device, at pang-araw-araw na kagamitan.
Tungkol sa atin
ALLELCO LIMITED
Magbasa nang higit pa
Mabilis na pagtatanong
Mangyaring magpadala ng isang pagtatanong, tutugon kami kaagad.
Madalas na nagtanong [FAQ]
1. Ano ang pagkakaiba sa pagitan ng controller at control system?
Ang controller ay ang device lang sa paggawa ng desisyon (tulad ng PLC o PID controller).Kasama sa isang control system ang controller at mga sensor, actuator, at ang prosesong kinokontrol.
2. Ano ang kontrol ng PID at bakit ito mahalaga?
Gumagamit ang kontrol ng PID ng mga proporsyonal, integral, at derivative na pagkilos upang mabilis at maayos na mabawasan ang error.Pinapabuti nito ang katatagan, katumpakan, at bilis ng pagtugon sa karamihan ng mga sistemang pang-industriya.
3. Bakit minsan nag-oocillate o nanghuhuli ang mga control system?
Ang oscillation ay nangyayari kapag ang mga pagwawasto ay masyadong agresibo o naantala.Ang mahinang pag-tune, mabagal na sensor, o labis na nakuha ay nagiging sanhi ng paulit-ulit na overshoot ng output.
4. Ano ang actuator saturation?
Nangyayari ang saturation ng actuator kapag naabot ng actuator ang pisikal na limitasyon nito at hindi na nito mapataas pa ang output.Pinipigilan nito ang system mula sa pagwawasto ng malalaking error.
5. Paano pinangangasiwaan ng mga control system ang mga pagkaantala sa mga proseso?
Gumagamit sila ng mga paraan ng pag-tune, mga filter, o mga predictive na algorithm upang mabayaran ang lag para mangyari ang pagwawasto sa tamang oras.

4.7 kΩ Resistor Guide: Color Code, Mga Paggamit, Pagsusuri at Paghahambing ng Halaga
sa 2026/02/16
Miniature Circuit Breaker (MCB): Prinsipyo sa Paggawa, Mga Uri, Mga Rating at Gabay sa Pagpili
sa 2026/02/15
Mga sikat na post
-

Complex Instruction Set Computers: Paano nila binago ang computing?
sa 8000/04/18 147757
-

USB-C pinout at mga tampok
sa 2000/04/18 111936
-

Gamit ang Xilinx Unified Simulation Primitives: Isang komprehensibong gabay sa disenyo ng FPGA at kunwa
sa 1600/04/18 111349
-

Mga Voltahe ng Power Supply sa Electronics: Kahulugan ng VCC, VDD, VEE, VSS, at GND
sa 0400/04/18 83721
-

RJ45 Gabay sa Konektor: Pinout, mga kable, mga uri ng cable, at paggamit
sa 1970/01/1 79508
-

Ang panghuli gabay sa mga code ng kulay ng kawad sa mga modernong sistema ng elektrikal
Ang paraan ng paggamit ng aming mga de -koryenteng sistema ay hindi lamang para sa mga hitsura.Ang bawat kulay ng kawad ngayon ay nagpapahiwatig ng isang tiyak na pag -andar, na ginagawang mas mada...sa 1970/01/1 66907
-

Purge Valve Guide: Function, sintomas, pagsubok, at kapalit para sa pinakamainam na pagganap ng engine
Ang balbula ng purge ay isang pangunahing bahagi ng sistema ng kotse na tumutulong na mapanatiling malinis ang hangin sa pamamagitan ng pamamahala ng mga singaw ng gasolina bago sila makatakas sa k...sa 1970/01/1 63035
-

Kalidad (Q) Factor: Mga Equation at Application
Ang kalidad na kadahilanan, o 'Q', ay mahalaga kapag sinusuri kung gaano kahusay ang mga inductors at resonator sa mga elektronikong sistema na gumagamit ng mga frequency ng radyo (RF).Sinusukat ng...sa 1970/01/1 63012
-

Pagkamit ng pagganap ng rurok na may maximum na teorema ng paglipat ng kuryente
Ang maximum na teorema ng paglipat ng kuryente ay nagpapaliwanag kung paano ang enerhiya mula sa isang mapagkukunan, tulad ng isang baterya o generator, ay dumadaloy sa isang konektadong pagkarga.I...sa 1970/01/1 54081
-

A23 Mga pagtutukoy ng baterya at pagiging tugma
Ang baterya ng A23 ay isang maliit, hugis-silindro na baterya na may mataas na boltahe.Tinatawag din ang 23A, 23AE, o MN21, tumatakbo ito sa 12 volts at mas mataas kaysa sa mga baterya ng ...sa 1970/01/1 52125
Mainit na bahagi ng numero
-

MCF52252CAF66
NXP USA Inc.
IC MCU 32BIT 256KB FLASH 100LQFP
MCP6S28-I/SL
Microchip Technology
IC OPAMP PGA 8 CIRCUIT 16SOIC
MAX9850ETI+T
Analog Devices Inc./Maxim Integrated
IC AMP CLASS AB STER 95MW 28TQFN
ZX62D-AB-5P8(30)
Hirose Electric Co Ltd
CONN RCPT USB2.0 MICRO AB SMD RA
RT9819A-48GU3
Richtek USA Inc.
IC SUPERVISOR 1 CHANNEL SC70-3
EPM7256AEFC256-7
Intel
IC CPLD 256MC 7.5NS 256FBGA
RT0805DRD0724K9L
YAGEO
RES SMD 24.9K OHM 0.5% 1/8W 0805
BC847BDW1T3G
onsemi
TRANS 2NPN 45V 0.1A SC88/SC70-6
P6KE7.5A-E3/73
Vishay General Semiconductor - Diodes Division
TVS DIODE 6.4VWM 11.3VC DO204AC
FA-20H 26.0000MF10Y-K5
EPSON
CRYSTAL 26.0000MHZ 10PF SMD
LMK316BJ475KD-T
Taiyo Yuden
CAP CER 4.7UF 10V X5R 1206
CZRU52C3V6-HF
Comchip Technology
DIODE ZENER 3.6V 150MW 0603
GRM0336S1E3R9CD01D
Murata Electronics
CAP CER 3.9PF 25V S2H 0201
MT29F64G08CBAAAWP-Z:A
Micron Technology Inc.
IC FLASH 64GBIT PAR 48TSOP I
HSMP-3893-BLKG
Broadcom Limited
RF DIODE PIN 100V SOT23-3
CDRH10D68NP-3R3NC
Sumida America Components Inc.
FIXED IND 3.3UH 8A 8.5 MOHM SMD
IS42S16320F-7TLI
ISSI, Integrated Silicon Solution Inc
IC DRAM 512MBIT PAR 54TSOP II
93LC56BT-I/SN
Microchip Technology
IC EEPROM 2KBIT MICROWIRE 8SOIC -

BQ24108RHLR
Texas Instruments
IC BATT CHG LI-ION 1CELL 20VQFN
S34ML08G301TFI000
Infineon Technologies
IC FLASH 8GBIT PARALLEL 48TSOP
ISL8391IB
Intersil
IC SWITCH SPST-NCX4 35OHM 16SOIC
UPS540E3/TR13
Microchip Technology
DIODE SCHOTTKY 40V 5A POWERMITE3
SXE15-48S05J
Artesyn Embedded Power
DC DC CONVERTER 5V 15W
STG3696EQTR
STMicroelectronics
IC SWITCH SPDT USB/AUDIO 10-QFN
M74HC86M1R
STMicroelectronics
IC GATE XOR 4CH 2-INP 14SO
BQ3285LDSS
Benchmarq
IC RTC CLK/CALENDAR PAR 24SSOP
GRM0336S1E130GD01D
Murata Electronics
CAP CER 13PF 25V S2H 0201
LTC3631IDD#PBF
Analog Devices Inc.
IC REG BUCK ADJ 100MA 8DFN
0805YG104ZAT2A
KYOCERA AVX
CAP CER 0.1UF 16V Y5V 0805
MAX4784EUE+
Analog Devices Inc./Maxim Integrated
IC SWITCH SPDT X 4 1OHM 16TSSOP
PQ30RV31J00H
Sharp Microelectronics
IC REG LINEAR POS ADJ 3A TO220-4
CL05C040BB5NNNC
Samsung Electro-Mechanics
CAP CER 4PF 50V C0G/NP0 0402
PIC16F1823-E/SL
Microchip Technology
IC MCU 8BIT 3.5KB FLASH 14SOIC
C8051F990-GM
Silicon Labs
IC MCU 8BIT 8KB FLASH 20QFN
04023C202KAT2A
KYOCERA AVX
CAP CER 2000PF 25V X7R 0402
ZA9L102BNW2CSGA431
Analog Devices Inc./Maxim Integrated
IC MCU 32BIT EXT MEM 256CSBGA -

AQW612SX
Panasonic Electric Works
SSR RELAY SPST-NO/NC 450MA 0-60V
MTB15N06VT4
onsemi
N-CHANNEL POWER MOSFET
C2012Y5V1H105Z/0.85
TDK Corporation
CAP CER 1UF 50V Y5V 0805
MC100E104FN
onsemi
IC GATE AND/NAND QD 2INP 28-PLCC
12067A2R7CAT2A
AVX Corporation
CAP CER 2.7PF 500V NP0 1206
TPA0252PWP
Texas Instruments
IC AMP AB STEREO 2.8W 24HTSSOP
DRV2667RGPR
Texas Instruments
IC MOTOR DRIVER 3V-5.5V 20QFN
N25Q128A13ESE40G
Micron Technology Inc.
IC FLASH 128MBIT SPI 8SOP2
MAX44284HAWT+T
Analog Devices Inc./Maxim Integrated
IC CURRENT SENSE 1 CIRCUIT 6WLP
1SMC36AT3G
Littelfuse Inc.
TVS DIODE 36VWM 58.1VC SMC
MC33172DG
onsemi
IC OPAMP GP 2 CIRCUIT 8SOIC
LTC3854IMSE#PBF
Analog Devices Inc.
IC REG CTRLR BUCK 12MSOP
PCI7612ZHK
Texas Instruments
IC PC CARD CONTROLLER 216-BGA
RC0805FR-0744K2L
Yageo
RES SMD 44.2K OHM 1% 1/8W 0805
TPS62230DRYT
Texas Instruments
IC REG BUCK 2.5V 500MA 6SON
DS3650MX
Texas Instruments
IC RECEIVER 0/4 16SOIC
GRM1557U1H510GZ01D
Murata Electronics
CAP CER 51PF 50V U2J 0402
KSH340TF
Fairchild Semiconductor
TRANS NPN 300V 0.5A TO252-3